

 QQ
QQ
ABB机器人与机器人变位机的配置方法与配置文件
工博士致力于机器人变位机的研发生产制造,为客户提供机器人变位机,焊接变位机,铸造变位机,变位机定制等一站式采购,以机器人周边产品工博士自主产品为核心,打造整体应用的综合服务平台。
机器人变位机适用于ABB机器人、库卡机器人、安川机器人、发那科机器人、川崎机器人、OTC机器人、爱普生EPSON、遨博机器人、现代机器人、那智机器人、电装机器人、欧姆龙机器人
1. 对于机器人变位机,如果有数模 ,可以在RobotStudio的机械装置中,将变位机制作成外轴类型的机械装置,然后使用外轴向导进行自动moc参数创建
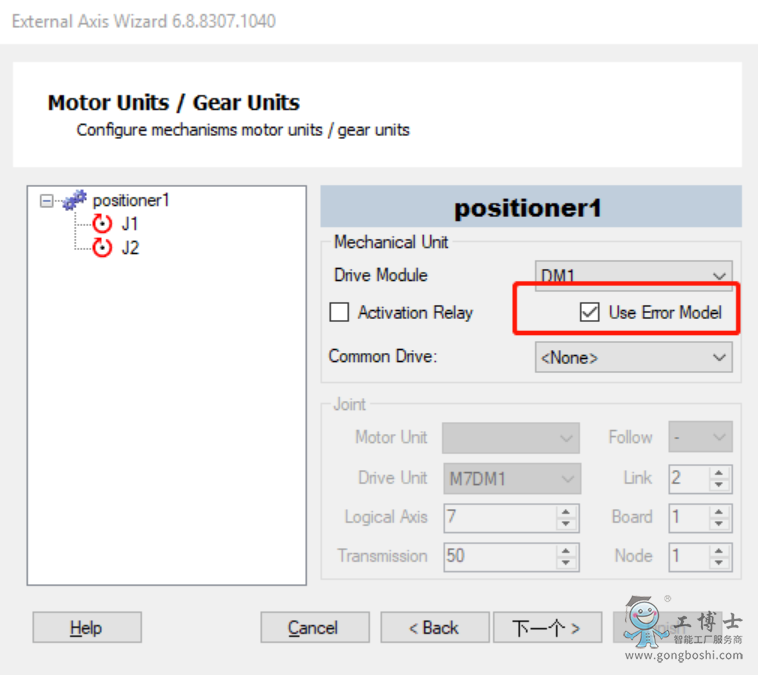
2. 在使用外轴向导时,以下地方要勾上 User Error Model(若此处为灰色,则是在制作机械装置是有问题,重新制作)。
使用了Error模型后,可以在后续第4步分别对机器人变位机的2个轴进行校准,机器人会根据两个轴校准得到的结果自动重算机器人变位机DH模型
若未使用Error模型后,在后续第4步时只能选择对变位机整体的Base进行校准,即机器人使用在moc中设置的机器人变位机DH模型参数,不可根据现场校准重算。
3. 后续设置每个轴的电机,减速比等参数
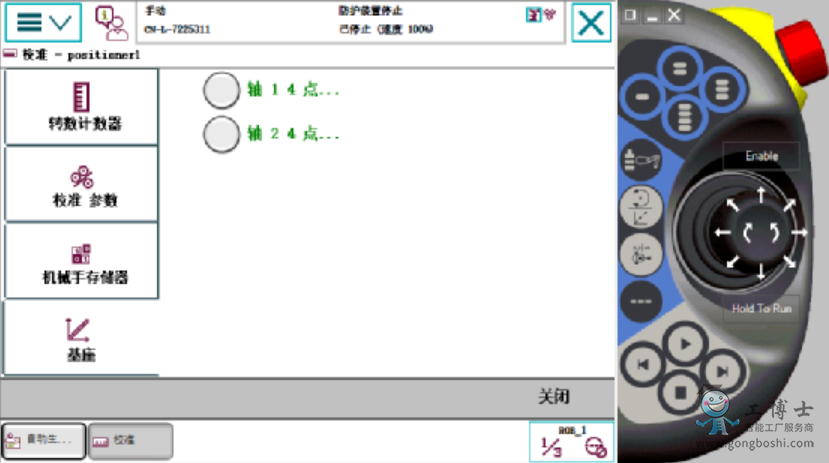
4. 重启后,即可在校准Base界面看到下图
即先对轴进行4点法校准,然后让1轴在0度,校准第二个轴。机器人会自动计算变位机内部DH并修改。
5. 备份中,该变位机也被识别为IRBP_A类型,error_model使用ERROR
6. 若二轴变位机没有模型,也可直接将以下文件保存为a_positioner.cfg,导入机器人后重启,再根据实际修改减速比,电机参数等。以下文件采用ERROR模型,即可现场对二轴变位机的每个轴进行校准,以实现二轴变位机与机器人的整体联动
MOC:CFG_1.0::
MECHANICAL_UNIT:
-name "STN1" -use_run_enable "" -use_activation_relay "" -use_brake_relay "rob1_brake" \
-use_robot "STN1" -stand_by_state -activate_at_start_up -deactivation_forbidden \
-allow_move_of_user_frame
#
ROBOT:
-name "STN1" -use_robot_type "STN1" -use_joint_0 "M7DM1" -use_joint_1 "M8DM1"
#
ROBOT_TYPE:
-name "STN1" -type "IRBP_A" -error_model "ERROR" -no_of_joints 2 -base_pose_rot_u0 1 \
-base_pose_rot_u1 0 -base_pose_rot_u2 0 -base_pose_rot_u3 0
#
ARM:
-name "M7DM1" -use_arm_type "M7DM1" -use_acc_data "M7DM1" -upper_joint_bound 3.14159265358979 \
-lower_joint_bound -3.14159265358979
-name "M8DM1" -use_arm_type "M8DM1" -use_acc_data "M8DM1" -upper_joint_bound 3.14159265358979 \
-lower_joint_bound -3.14159265358979
#
ARM_TYPE:
-name "M7DM1" -length 0 -offset_z 0 -theta_home_position 0 -attitude 0 -rot_axis_pose_pos_x 1.2 \
-rot_axis_pose_pos_y 0 -rot_axis_pose_pos_z 0.7 -rot_axis_pose_orient_u0 0.707106781186548 \
-rot_axis_pose_orient_u1 0.707106781186547 -rot_axis_pose_orient_u2 0 -rot_axis_pose_orient_u3 0
-name "M8DM1" -length 0 -offset_z 0.2306 -theta_home_position -3.14159265358979 \
-attitude 1.5707963267949 -rot_axis_pose_pos_x 1.2 -rot_axis_pose_pos_y 0 \
-rot_axis_pose_pos_z 0.9306 -rot_axis_pose_orient_u0 1 -rot_axis_pose_orient_u1 0 \
-rot_axis_pose_orient_u2 0 -rot_axis_pose_orient_u3 0
#
JOINT:
-name "M7DM1" -logical_axis 7 -use_measurement_channel "M7DM1" \
-use_axc_filter "M7DM1" -use_arm "M7DM1" -use_transmission "M7DM1" \
-use_brake "M7DM1" -use_supervision "M7DM1" -use_drive_system "M7DM1" \
-drive_module 1 -use_drive_module "drive_module_1" \
-uncalibrated_control_master_type "UCCM0" \
-use_uncalibrated_control_master "M7DM1" -normal_control_master_type "LCM0" \
-use_normal_control_master "M7DM1"
-name "M8DM1" -logical_axis 8 -use_measurement_channel "M8DM1" \
-use_axc_filter "M8DM1" -use_arm "M8DM1" -use_transmission "M8DM1" \
-use_brake "M8DM1" -use_supervision "M8DM1" -use_drive_system "M8DM1" \
-drive_module 1 -use_drive_module "drive_module_1" \
-uncalibrated_control_master_type "UCCM0" \
-use_uncalibrated_control_master "M8DM1" -normal_control_master_type "LCM0" \
-use_normal_control_master "M8DM1"
#
TRANSMISSION:
-name "M7DM1" -rotating_move -transm_joint 50 -high_gear 50
-name "M8DM1" -rotating_move -transm_joint 50 -high_gear 50
#
MEASUREMENT_CHANNEL:
-name "M7DM1" -use_measurement_board_type "DSQC313" -measurement_link
-board_position 1 -measurement_node 1
-name "M8DM1" -use_measurement_board_type "DSQC313" -measurement_link
-board_position 1 -measurement_node 2
#
ACC_DATA:
-name "M7DM1" -wc_acc 12 -wc_dec 12 -wc_dacc_ratio 1 -wc_ddec_ratio 1
-name "M8DM1" -wc_acc 12 -wc_dec 12 -wc_dacc_ratio 1 -wc_ddec_ratio 1
#
BRAKE:
-name "M7DM1" -control_off_speed_limit 0.02 -control_off_delay_time 0.3 \
-use_brake_type "3HAC029924-007"
-name "M8DM1" -control_off_speed_limit 0.02 -control_off_delay_time 0.3 \
-use_brake_type "3HAC029924-007"
#
SUPERVISION:
-name "M7DM1" -use_supervision_type "M7DM1" -power_up_position_on \
-counter_supervision_on -position_supervision_on -speed_supervision_on \
-load_supervision_on -jam_supervision_on -thermal_motor_supervision_on \
-in_position_range 1 -normalized_zero_speed 0.02 \
-dsp_torque_limitation_zero_speed_width 1 \
-reference_master_pos_supervision_on
-name "M8DM1" -use_supervision_type "M8DM1" -power_up_position_on \
-counter_supervision_on -position_supervision_on -speed_supervision_on \
-load_supervision_on -jam_supervision_on -thermal_motor_supervision_on \
-in_position_range 1 -normalized_zero_speed 0.02 \
-dsp_torque_limitation_zero_speed_width 1 \
-reference_master_pos_supervision_on
#
SUPERVISION_TYPE:
-name "M7DM1" -static_power_up_position_limit 3 \
-dynamic_power_up_position_limit 150 -static_position_limit 3 \
-dynamic_position_limit 200 -static_normalized_speed_limit 0.06 \
-dynamic_normalized_speed_limit 0.3 -normalized_influence_sensitivity 0 \
-speed_half_time 0.5 -max_jam_normalized_speed 0.05 -max_overload_time 0.5 \
-max_jam_time 0.5 -teach_mode_speed_max_main 0.15 \
-teach_mode_speed_max_dsp 0.28
-name "M8DM1" -static_power_up_position_limit 3 \
-dynamic_power_up_position_limit 150 -static_position_limit 3 \
-dynamic_position_limit 200 -static_normalized_speed_limit 0.06 \
-dynamic_normalized_speed_limit 0.3 -normalized_influence_sensitivity 0 \
-speed_half_time 0.5 -max_jam_normalized_speed 0.05 -max_overload_time 0.5 \
-max_jam_time 0.5 -teach_mode_speed_max_main 0.15 \
-teach_mode_speed_max_dsp 0.28
#
AXC_FILTER:
-name "M7DM1" -use_feedback_iir2_filter "LP_496" \
-use_speed_error_iir2_filter1 "NOTCH_248" \
-use_speed_error_iir2_filter2 "LAG_16_72" -use_force_control_filter "ONE" \
-use_torque_limit_iir1_filter1 "LP_25" -use_torque_limit_iir1_filter2 "LP_25"
-name "M8DM1" -use_feedback_iir2_filter "LP_496" \
-use_speed_error_iir2_filter1 "NOTCH_248" \
-use_speed_error_iir2_filter2 "LAG_16_72" -use_force_control_filter "ONE" \
-use_torque_limit_iir1_filter1 "LP_25" -use_torque_limit_iir1_filter2 "LP_25"
#
DRIVE_SYSTEM:
-name "M7DM1" -use_current_transfer_function "cur_tr_1.00" \
-use_current_controller "c_c_fast_1" -use_mains "mains" \
-use_trafo "trafo_dm1" -use_dc_link link
-use_cable "cable_4.5_30" -use_motor "M7DM1" -use_thermal_duty_cycle "M7DM1" \
-use_stress_duty_cycle "M7DM1" -mugu_active
-name "M8DM1" -use_current_transfer_function "cur_tr_1.00" \
-use_current_controller "c_c_fast_1" -use_mains "mains" \
-use_trafo "trafo_dm1" -use_dc_link link
-use_cable "cable_4.5_30" -use_motor "M8DM1" -use_thermal_duty_cycle "M8DM1" \
-use_stress_duty_cycle "M8DM1" -mugu_active
#
MOTOR:
-name "M7DM1" -use_motor_type "3HAC029924-007" -use_motor_calib "M7DM1"
-name "M8DM1" -use_motor_type "3HAC029924-007" -use_motor_calib "M8DM1"
#
MOTOR_CALIB:
-name "M7DM1" -com_offset 1.5708 -valid_com_offset -cal_offset 0
-name "M8DM1" -com_offset 1.5708 -valid_com_offset -cal_offset 0
#
THERMAL_DUTY_CYCLE:
-name "M7DM1"
-name "M8DM1"
#
STRESS_DUTY_CYCLE:
-name "M7DM1" -speed_absolute_max 523.5 -torque_absolute_max 7.5
-name "M8DM1" -speed_absolute_max 523.5 -torque_absolute_max 7.5
#
UCCM0:
-name "M7DM1" -Kp 10 -Kv 1 -Ti 0.1 -speed_max_n 15 -acc_max_n 100 \
-dec_max_n 100
-name "M8DM1" -Kp 10 -Kv 1 -Ti 0.1 -speed_max_n 15 -acc_max_n 100 \
-dec_max_n 100
#
LCM0:
-name "M7DM1" -Kp 10 -Kv 1 -Ti 0.1 -ffw_mode 1
-name "M8DM1" -Kp 10 -Kv 1 -Ti 0.1 -ffw_mode 1
#
更多资讯:机器人变位机
